許可なしでドローンの飛行場所を見つける最も効率の良い方法【永久保存版】
waikler
ドローンウォーカー


この記事は「無人航空機の飛行の安全に関する教則」の「4.4 機体の構成」についてわかりやすく解説した記事になります。
ドローンの基礎知識と専門用語を掲載しております。
ドローンスクールや講習ではできるだけ分かりやすい単語で進めますが、専門用語もしっかりと理解しておくことはとても重要です。

ドローンの機体本体とそれを操縦する送信機(プロポ)になります。
ドローンと言っても様々な種類や形状があります。
ここでは皆さんが真っ先にイメージする「4枚羽」のドローンを掲載。
各部位の名称は上記の通りになります。


テレビゲームのコントローラーのような形状になっております。
今のドローンの送信機の多くは、ほぼ全ての国民が持っているスマホをディスプレイにして操縦すことがほとんです。
ドローンの機体に搭載されているカメラをリアルタイムで転送してくれますので、操縦者はドローンがどんな景色を撮影しているのか、確認しながら操縦することができます。
無人航空機への指令は送信機から機体へ送られます。
ドローン本体では、受信機が指令を受け取りメインコントローラーからモーター又はサーボを駆動させ機体を操縦しています。

送信機の信号は、同じ周波数帯が密集しているような場所で複数の電波が干渉して混信による誤作動が起きる可能性があります。
電波混信の予防として飛行させる前に測定器などで周辺の電波の状態を確認することが望ましいです。
無人航空機で使用される送信機からの電波だけでなく、無線LAN、Wi-Fi、高圧送電線の影響を受ける場合もあるため、周辺環境の確認が必要となります。
DJIのドローンなど機種によっては電波の電送状態を確認できるものもあります。
無人航空機は、送信機のスティックを操作して、機体の重心を中心とする3軸の回転で成り立っています。
さらにローターの推力の増減といった機体の動きの制御を行います。
以下のとおりスティック操作による機体の動きの割り当てはモードにより異なります。
また、スティックのニュートラル位置を調整するためのトリムスイッチがある場合もあります。

(a) スロットル: 機体の上昇・降下
(b) エレベーター: 機体の前後移動
c) エルロン: 機体の左右移動
(d) ラダー: 左右旋回
(a) スロットル: 前後移動
(b) エレベーター: 上昇・降下
(c) エルロン: ロール方向の操作
(d) ラダー: ヨー方向の操作

角度が付いたプロペラを回転させると風が当たり、プロペラの上に動きが速い風、下に遅い風が起こり風圧が生まれます。
圧力は高い方から低い方へ移動する性質があります。
これによって機体が上昇する揚力が生まれます。
マルチコプタータイプ(ここでは 4 モーター式で説明する)のドローンは交互に右回り、左回りのプロペラを配置することにより回転の反作用を打ち消し合い機体のバランスを保っています。
ドローンが上昇する時は全てのプロペラの回転を上げることにより上昇します。
降下時はプロペラの回転を下げることにより行われます。
急降下させると自機のプロペラが起こす乱気流により不安定となり大変危険です。
ドローンが前進するには後ろ二つのプロペラの回転を上げることにより前進します。
後退はこの逆です。
ドローンを左に動かすには後ろから機体を見て、右側二つのプロペラの回転を上げることにより機体は左へ移動します。
右に移動するにはこの逆です。
ドローンを左旋回させるには交互に配置されている左前と右後ろのプロペラの回転を挙げることにより左旋回します。右旋回はこの逆です。
以上のような移動方法を組み合わせることによりドローンは複雑な動きを可能にしています。
またドローンが安定して飛ぶ事が可能なのは様々な制御機器が搭載されているからです。
ドローンの飛行原理や動きについて以下の記事も参考にしてください。


空撮用ドローンの機体正面にはカメラが搭載されており、その大半はカメラを上下に動かすことができます。
上位モデルになると360度自由に動かせる機体もありますが、その場合カメラオペレーターと機体の操縦者、2名体制で運用することが多いです。
カメラの角度(チルト)を上げることを「チルトアップ」。
チルトを下げることを「チルトダウン」と呼びます。
フライトコントローラー(FC)はドローンの心臓部または頭脳と呼ばれます。
機体の挙動や傾きを計測するジャイロセンサーや高度を検知する気圧センサー、GPS の位置情報から演算し、制御することで安定した飛行を実現します。
ドローンの性能はフライトコントローラーで大きく左右します。
モーターの回転数は ESC(エレクトロニックスピードコントローラー)により制御されています。
モーターで駆動されたローターの回転数を増減させることにより揚力や推力を変化させています。
ESC(Electric Speed Controller) は、フライトコントローラーから指示を受け各モーターの回転出力を制御しています。
フライトコントロールシステムは、搭載されている各種センサー
各種センサーからの情報や送信機から発信された情報を処理し機体を制御するための信号を送るシステムになります。
センサー類は、キャリブレーションを必要とするものが多いため、各ドローン毎に指定された方法で、キャリブレーションを正しく実行する必要があります。
フライトコントロールシステムを構成する一般的なデバイスには以下のものがある。
人工衛星の電波を受信し、機体の地球上での位置・高度を取得するデバイスです。
GNSS(Global Navigation Satellite System)は GPS、GLONASS、Galiieo、BeiDou、準天頂衛星(QZSS)、等の衛星測位システムの総称です。
これらの衛星からの位置情報を得て空中で留まれるホバリングが可能になります。
現在のドローンの多くに搭載されております。
現在のドローンは様々なセンサーにより「安定したホバリング、距離測定、障害物回避」を可能にしています。
回転角速度を測定するデバイスです。
加速度を測定するデバイスです。
3軸のジャイロセンサと3方向の加速度センサ等によって3次元の角速度と加速度を検出する装置。
また、メーカーによっては気圧センサを含む場合もあります。
機体が向いている方向を地磁気を用いて取得するデバイス。
高度センサ レーザーや気圧センサなどを用い地上からの高度を取得するデバイス。
ドローンにおいてローターを駆動するモーターには、「ブラシモーターとブラシレスモーター」があります。
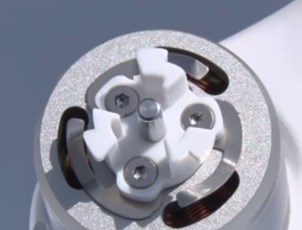
現在、モーターを原動力に使用するドローンの多くはブラシレスモーターを使用しています。
ブラシレスモーターの特徴は、メンテナンスが容易(モーター内部の清掃、ブラシの交換が不要等)、静音、長寿命です。
ローター自身が磁石になっており、ステーターのコイルに通電、それを半導体スイッチで切り替えを行ってモーターを回転させています。
ブラシレスでは、ブラシモーターの欠点であった磨耗を防ぐことができ、メンテナンスが少なく済む上、なめらかの動きが可能になります。
ブラシレスモーターは普通のモーターより強力で耐久性に優れ、スピードが速いことが特徴です。
また、ローターは通常回転方向(時計回転(CW:クロックワイズ)・反時計回転(CCW:カウンタークロックワイズ))に合わせた形状となっており、モーターの回転方向に合わせて取り付けるよう注意が必要です。

ドローンで利用されるプロペラは、重要な部品であり高回転で回り大きな力を受けています。
プロペラには数字が記されており、直径とピッチを表しています。
プロペラピッチは 1 回転で進む距離を表しています。
電池に関係する用語、単位、求め方及びその概要は以下になります。
| 用語 | 単位 | 求め方 | 概要 |
| 電圧 | V | 抵抗(R)×電流(A) | 電圧は、電池残量(現時点で放電できる電気量)で決まる。 電池の残量が減ると電池の電圧は下がる。 放電(飛行)中の電圧降下は、電気回路の配線抵抗とバッテリーの内部抵抗によって決まる。 |
| 出力 | W | 放電時電圧(V)×電流(A) | 単位時間当たりのエネルギー量を表す。出力が一定の場合、電池残量が少なくなると、放電時電圧が低下するため、電流は増大する。 |
| 容量 | Ah | 電流(A)×時間(h) | 満充電から、電圧が決められた最低電圧(終止電圧)になるまでの間に、利用できる電気量。 放電時の電流の大きさや温度によって、 利用可能な容量は変化する。 |
| エネルギー容量 | wh | 放電時電圧(V)×電流(A)×時間(h) | 容量と同様に、電流や温度によってエネ ルギー容量は変化する。 |
| 充電率 | % | 現時点で放電できる電気量(Ah)/ 満充電時に放電できる電気量(Ah) | 満充電で放電できる電気量と現時点で放電できる電気量の比率を表す。 0%は仕様上の完全放電状態を、100%は満充電状態を表す。 |


機体に装備しているカメラで撮影しているリアルタイムの映像をモニターやゴーグルに伝送する場合も電波を使用しています。
無人航空機の機体の動力源として「電動かエンジン」が使用されています。
電動機のメリットは、振動、騒音が少ないため軽量化できますが、飛行時間が短いというデメリットがあります。
エンジン機のメリットは、飛行時間が長く長距離飛行が可能になりますが、エンジンによる騒音が電動に比べ大きいというデメリットあります。
電動かエンジンかメリットデメリットありますが、現在ではリポバッテリーを動力として動いてる場合が多いです。
リチウムポリマーバッテリーはゲル状のポリマー電解質を採用したリチウムイオンバッテリーであり、多くの無人航空機に使用されています。
バッテリーの中でも高性能でエネルギー密度が高く、大容量、高出力、軽量という特徴を持っています。
モーターの出力により飛行するドローンには適したバッテリーと言えます。
リポバッテリーは電解質が可燃物である等の特徴があります。
そのため過放電、過充電、ショート、破損により化学反応を起こし充電が出来なくなったり破裂や出火の恐れがあるのでリポバッテリーの取扱には十分な注意が必要です。

リポバッテリーは 1 から数セルの組み合わせで構成されています。1 セルは 3.7V で 3 セルであれば 3.7× 3 = 11.1V となります。
各セルは接続されており全てのセルが同じ電圧でないと一部のセルに負荷がかかり発火の可能性があります。そのためバランサーという装置が使われバランス充電を行います。
またフライト直後のバッテリーは高温になっており、すぐに充電できません。
時間をおいて充電します。
リポバッテリーの保管にも注意が必要です。
完全放電や満充電の状態で保管すると寿命を縮め使用が出来なくなる恐れがあります。
直ぐに使用しない場合はバッテリー残量を 50%〜 70% 前後にして保管することが必要です。
高温になるような自動車内に放置しないようにします。
・バッテリーは液体類に接触させないようにします。
バッテリー内部に水分が入ると、化学反応が生じ、発火爆発の恐れがあります。
・バッテリーは-10~40℃の温度で使用します。50℃を超える環境でバッテリーを使用すると火災や爆発の恐れがあります。
-10℃未満でバッテリーを使用すると、回復不能な状態になることがあります。
一般的には完全放電した後に各自治体の処理方法に従い廃棄します。
完全放電させるには塩水浸けて放電させます。
DJI 社製インテリジェントフライトバッテリー
バッテリー内に制御基板を備え、バランス充電を可能にしています。
満充電になると充電を停止する過充電防止機能や、長期間使用しない場合は保管に適した状態まで放電する機能も備えています。
最近は 1 セル当たり3.8V のハイボルテージバッテリーが主流になっています。
セル間の充電量のバランスを補正しながら充電することが重要です。
バランスが著しく崩れたまま充電を行うとセル間の電圧差が生じ、セルによって過放電となる現象が起こり、急速に劣化が進みます。
そのため、セル間の充電量のバランスをとるバランスコネクタがついているタイプは、充電時にそのコネクタを充電器へ接続することが重要になります。
エンジン機は、エンジンの回転を動力にローターを回転させ揚力と推力を得ています。
エンジンには2ストロークエンジン、4 ストロークエンジン、グローエンジン等の種類があります。
エンジンの種類により、潤滑方式、燃焼サイクル、点火温度等が異なります。
燃料にも種類があり、それぞれのエンジンでメーカーが指定する燃料を適切に扱う必要があり。
燃料にオイル等を混ぜた混合燃料を使用する場合は、適切な混合比での使用が必要となります。

無人航空機で物件投下する機器は、救命機器等を機体から落下させる装置や農薬散布のために液
体や粒剤を散布する装置などがあります。
物件投下装置は、意図せず物件が落下しない構造となっています。
投下装置の多くは、搭載位置や対象物や手順などが定められているため、各投下装置の特性と機能を熟知する必要があります。
特に、物件投下用のウインチ機構で吊り下げる場合は、物件の揺れ、投下前後の重心の変化に注意しなければなりません。
農薬散布する装置の多くは、それぞれ決められた飛行速度、飛行高度などが定められています。
ただし、風などの影響で対象区域より飛散する可能性があるため、第三者や第三者の土地に農薬が誤って散布しないように配慮しなければなりません。
ドローンの多くは、機体の異常情報を機体本体や送信機のランプや音などで知らせる機能を持っています。
また、飛行軌跡や機体の情報「フライトデータ」を記録している機種もあり、事故の原因分析を詳細に確認することも可能となります。
事故や故障の原因調査は、機体や飛行の安全性を向上させる重要な要素になります。
そのためフライトデータを記録することが大切になります。
先にも記載しましたが、リポバッテリーには様々なトラブルのリスクがあります。
満充電のリチウムポリマーバッテリーを使用し無人航空機を急上昇させた場合、直後にバッテ
リー残量が減った様に見えることがあります。
これはバッテリーから大きな電流が流れたことで一時的な電圧低下が生じることが原因です。
そのため冬季のドローン運用は飛行時間が半減することもあります。
気温が低下すると放電能力が極端に低下するためです。
そのため事前にバッテリーの保温も大切です。
リチウムポリマーバッテリーは高密度なエネルギーを大容量で出力できますが、バッテリー残量が減り、電圧低下してくると急激に出力が弱くなり、墜落の原因となるので注意が必要です。